Autonomní malý robot pro sledování čáry
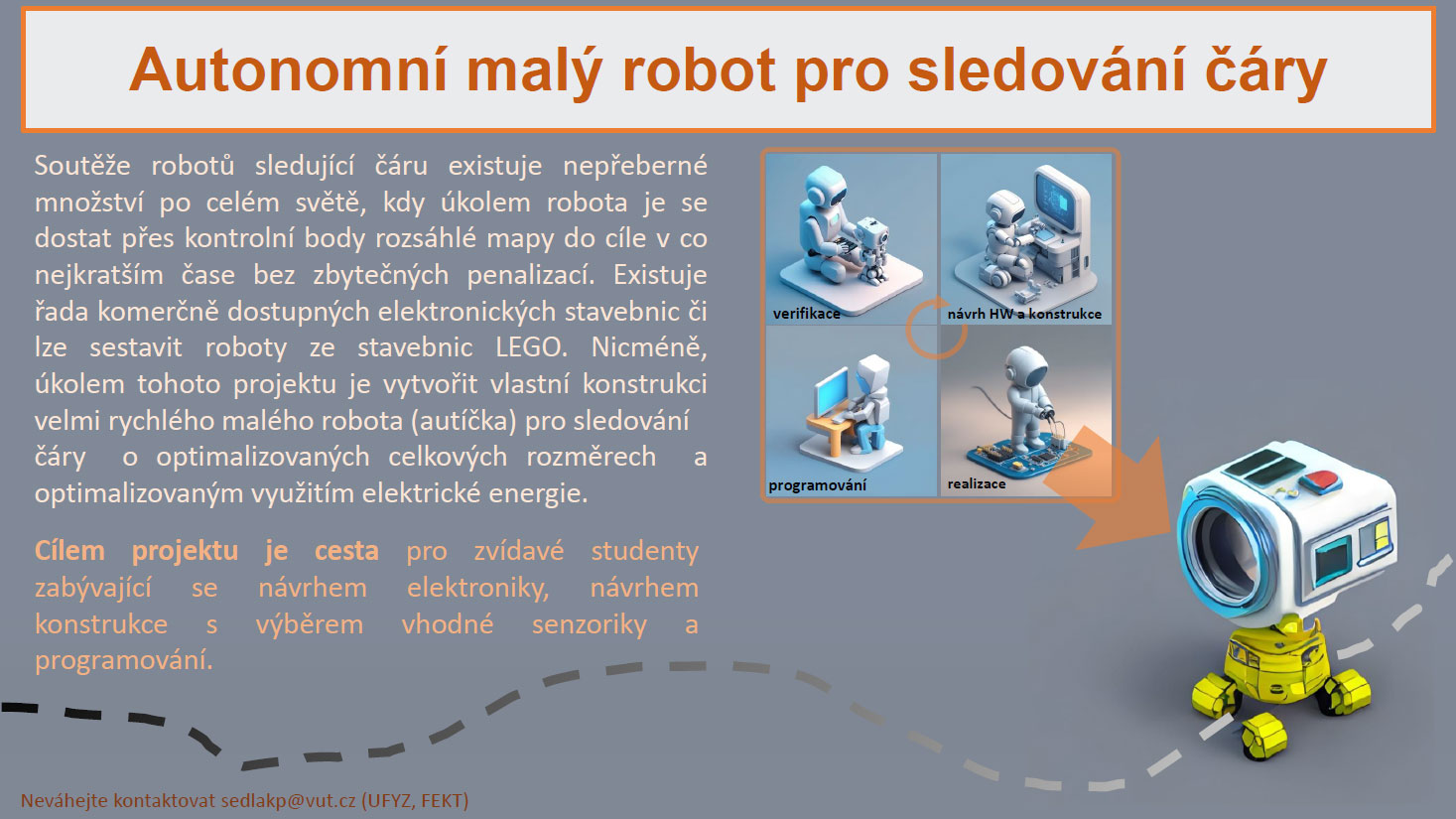
Soutěže robotů sledující čáru existuje nepřeberné množství po celém světě, kdy úkolem robota je se dostat přes kontrolní body rozsáhlé mapy do cíle v co nejkratším čase bez zbytečných penalizací. Existuje řada komerčně dostupných elektronických stavebnic či lze sestavit roboty ze stavebnic LEGO. Nicméně, úkolem tohoto projektu je vytvořit vlastní konstrukci velmi rychlého malého robota (autíčka) pro sledování čáry o optimalizovaných celkových rozměrech a optimalizovaným využitím elektrické energie. Cílem projektu je cesta pro zvídavé studenty zabývající se návrhem elektroniky s výběrem vhodné senzoriky a programování.
Sestava pro odb2
Cílem projektu je vytvořit systém pro sběr a uchování vzorků mimozemského regolitu. Projekt si klade za cíl navrhnout, zkonstruovat a oživit zařízení, které bude schopno nejprve odvrtat kus horniny, zachová její vrstvení, přenese vzorky do úložného prostoru a tam provede základní měření hmotnosti, objemu, vlhkosti, atd. Nakonec pak zařízení uloží vzorky pro budoucí bezpečný návrat na Zem, do laboratoří VUT. Výstup projektu bude zaintegrován do Brno Mars Roveru a bude se účastnit European Rover Challenge soutěže.

Inteligentní hangár - zařízení pro automatické přistávání bezpilotního letadla typu multikoptéra s inteligentními prvky
Cílem projektu je navrhnout a realizovat inteligentní hangár, který bude sloužit pro automatické přistávání bezpilotního letadla (dronu) typu multikoptéra. Do přistávání nebude zasahovat člověk, a proto je potřeba inteligentní hangár navrhnout se speciálními senzory a komunikačním rozhraní, které bude komunikovat s přistávajícím dronem. Výsledkem by měla být potřebnáu infrastruktura pro vzdálený dohled a ovládání přistávacího hangáru pro bezpilotní letadlo. Nutné bude navrhnout řídicí elektorniku včetně mikrokontroleru. Hnagár by měl umožňovat dosednutí a připojení bezpilotního letadla na kontaktní plochu pro nabíjení akumulátoru, měření potřebných parametrů dobíjení, bezdrátové připojení pro čtení telemetrických dat, měření venkovnách klimatických podmínek i podmínek unitř hangáru.

Aplikace pro stanovení tepové frekvence pomocí mobilního telefonu
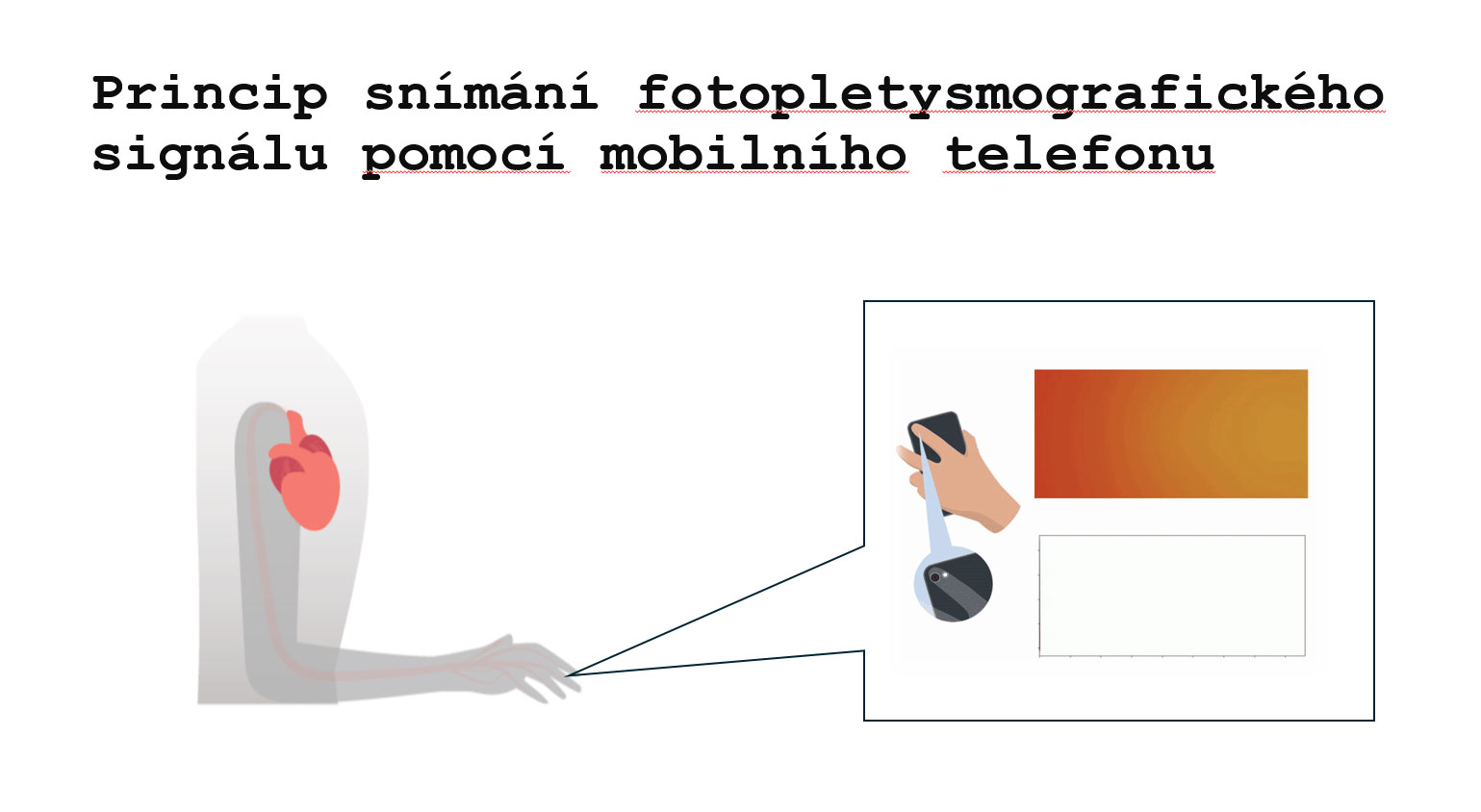
Prevence kardiovaskulárních onemocnění je v dnešní době velmi zanedbávaná a často se k přeměření krevního tlaku nebo tepové frekvence dostanete pouze u lékaře. Hodnot tepové frekvence nebo krevního tlaku lze také dosáhnout pomocí různých biologických signálů. To je trendem výzkumu v oblasti monitorování lidského zdraví. Zařízení pro takové monitorování by měla být přenosná, dostupná a hlavně levná. Proto se často jako senzor volí chytré hodinky nebo mobilní telefony.
Tento projekt je zaměřen na snímání biologických signálů chytrým telefonem. Činností srdce vznikají objemové změny v cévním systému, které jsou pozorovatelné i na prstu nebo v oblyčeji a jejich záznam pomocí optické metody fotopletysmografie se nazývá fotopletysmogram (PPG). Činností srdce, konkrétně uzavíráním chlopní, zase vznikají zvuky, které je možné nahrát mikrofonem mobilního telefonu. Tento audiozáznam srdečních ozev se nazývá fonokardiogram (PCG).
Projekt má 4 hlavní cíle:
1) naměřit EKG (reference) zařízením Faros a data různými mobilními telefony a doplnit tak poskytnutou databázi na UBMI.
2) na poskytnutých a naměřených datech vytvořit algoritmus pro odhad tepové frekvence.
3) navrhnout a vytvořit aplikaci, která bude online či offline odhadovat tepovou frekvenci přímo z dat chytrého telefonu.
4) porovnání výsledků pro různé mobilní telefony.
DeltaBot
Vstupte do světa inovací a technologického pokroku s naším ambiciózním projektem "DeltaBot". Cílem tohoto projektu je postupně konstruovat a optimalizovat delta robot, který bude využíván jako multifunkční nástroj ve výuce robotiky, teorie řízení, automatizace a dalších příbuzných oblastech. Účast v tomto projektu umožní studentům nejenom vytvořit fyzický robot, ale také se ponořit do široké škály disciplín, včetně modelování, měření a optimalizace.DeltaBot slibuje nejen praktický přístup k výuce robotiky, ale také otevírá dveře pro zkoumání pokročilých konceptů v oblasti automatizace a optimalizace. Studenti budou mít možnost experimentovat s různými řídicími strategiemi, modelovat chování robota, a dokonce i zkoumat možnosti dalšího vylepšení. Tento projekt není jen o konstrukci robotu; je to o vytváření mostu mezi teorií a praxí v oblasti moderní robotiky. Připojte se k nám a buďte součástí revoluce ve vzdělávání a vývoji robotických technologií!
RoboCafé
Cilem je vytvořit obslužný software pro existující robotickou výrobní buňku zajišťující funkci výroby kafe. Robotická buňka obsahuje průmyslový 6-osý robotický manipulátor, běžně dostupný kávovar a vakuový kompresor na uchopení kelímku. Do buňky je nutné implementovat PLC řídicí systém s HMI panelem. K tomu je nutné vytvořit PLC aplikaci a vizualizaci. Dále je možné upravit trajektorie chodu robota v CNC jazyce pro dosažení efektivnějšího pohybu. Vytvořením virtuálního modelu (digitálního dvojčete) celé buňky je možné optimalizovat souslednost pohybů a vygenerovat tyto pohyby optimálně. Tento projekt se zaměřuje na technologie 4. průmyslové revoluce.

Autonomous meeting organizer
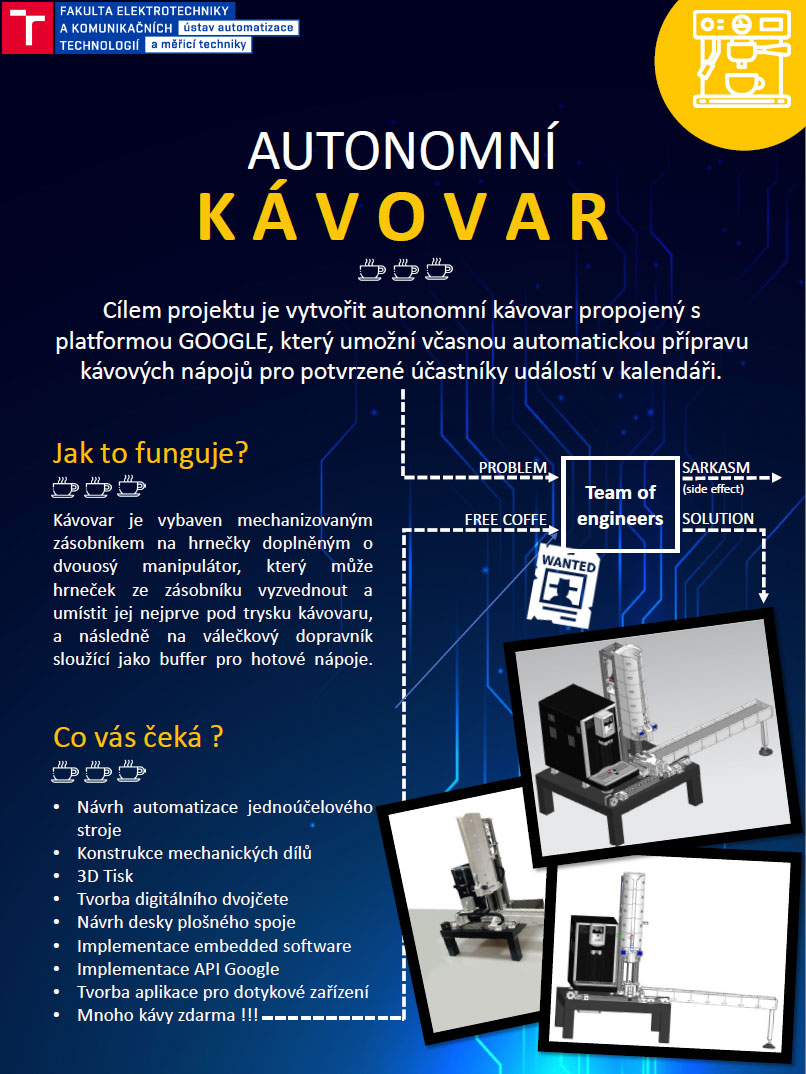
Cílem projektu je vybavit již existující manipulátor, který obsluhuje automatický kávovar elektronikou a softwarem, který umožní integraci s kalendářem Google. V případě, kdy uživatel vytvoří schůzku a přiřadí k ní účastníky, stroj na plánovaný termín uvaří bez zásahu uživatele kávu pro všechny. V rámci projektu bude nutné vybavit běžně prodávaný kávovar systémem umožňujícím programovou obsluhu, naprogramovat integraci s manipulátorem a propojení s API externí služby.